
田利鋒 凌晨 聶朝輝 王三娃
(河鋼集團(tuán)邯鋼能嘉公司薄板廠 河北 邯鄲 056015)
摘 要:本文介紹了熱軋機(jī)組活套的控制過(guò)程和穩(wěn)定性研究,通過(guò)PDA記錄的活套動(dòng)作過(guò)程波形數(shù)據(jù),分析活套擺角與張力、套量的平衡,重點(diǎn)分析小套過(guò)程的數(shù)據(jù),尋找最佳小套控制起始點(diǎn)和活套下降斜率曲線,有效克服軋機(jī)震動(dòng)、板帶甩尾、迭軋等異常現(xiàn)象對(duì)設(shè)備造成的危害。我廠熱軋機(jī)組通過(guò)小套過(guò)程控制優(yōu)化,大幅度降低了甩尾現(xiàn)象和設(shè)備故障。對(duì)設(shè)備維護(hù)、工藝指標(biāo)、產(chǎn)品質(zhì)量提供了有效方法,并保證其長(zhǎng)期穩(wěn)運(yùn)行具有重要意義。
關(guān)鍵詞: 熱軋機(jī)組;活套;PI控制;數(shù)據(jù)分析診斷
1 引言
在現(xiàn)代熱連軋系統(tǒng)中,恒定活套量和微張力軋制是其基本特點(diǎn),所以活套裝置與其控制系統(tǒng)是熱連軋機(jī)組的重要設(shè)備之一。它的工作狀況對(duì)生產(chǎn)的正常進(jìn)行和帶鋼成品質(zhì)量具有非常重要的作用。
一般介紹活套的文獻(xiàn),多側(cè)重于活套的系統(tǒng)構(gòu)成和控制原理,當(dāng)然這是活套工作的基本前提,但是熱連軋系統(tǒng)作業(yè)中要想保持活套裝置長(zhǎng)期穩(wěn)定優(yōu)越的性能,需要根據(jù)其基本的控制原理與實(shí)際動(dòng)作狀態(tài),不斷完善優(yōu)化控制過(guò)程,消除各種外界因素,保證活套起落動(dòng)作的平穩(wěn)過(guò)度過(guò)程。
2 活套裝置及其控制過(guò)程簡(jiǎn)介
活套裝置示意圖如圖1所示。我廠1780精軋機(jī)組由七架機(jī)架六個(gè)活套裝置組成。機(jī)架Fi與Fi+1間帶鋼實(shí)際長(zhǎng)度(L1+L2)與機(jī)架間距離(L3)之差即為套量(⊿L)。顯然,套量與活套輥擺角θ存在固定的函數(shù)關(guān)系。通過(guò)絕對(duì)值編碼器檢測(cè)活套輥擺角θ,通過(guò)兩個(gè)壓力傳感器分別檢測(cè)活套液壓缸桿側(cè)壓力P1與塞側(cè)的壓力P2,就可以由控制器通過(guò)控制活套液壓缸的伺服閥,實(shí)現(xiàn)套量與張力的雙閉環(huán)PI控制。
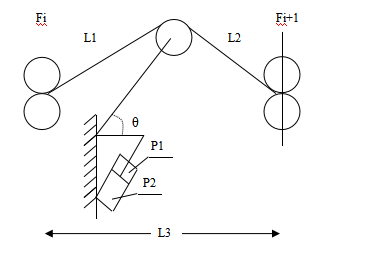
圖1活套裝置示意圖
Fig.1 The explanatory views of looper structure
活套的控制過(guò)程可以分為三個(gè)階段:活套的起套控制、活套恒張力與帶鋼秒流量平衡控制、活套的落套控制。當(dāng)帶鋼頭部經(jīng)過(guò)活套的上游機(jī)架時(shí),活套進(jìn)入預(yù)備升起位置,當(dāng)帶鋼頭部進(jìn)入下游機(jī)架時(shí),活套升起,活套輥與板帶接觸,并保持一定的套量,進(jìn)入活套的恒張力與帶鋼秒流量平衡控制階段,即通過(guò)對(duì)活套角度與上下游機(jī)架速度的調(diào)節(jié),保持帶鋼張力基本恒定。當(dāng)帶鋼尾部即將接近活套上游機(jī)架時(shí),活套輥準(zhǔn)備降落。為了使落套時(shí)帶鋼運(yùn)行平穩(wěn),在活套完全落下之前設(shè)計(jì)了“小套”控制過(guò)程,即把活套的落套過(guò)程為二步:當(dāng)帶尾到達(dá)活套上游機(jī)架前的某一位置時(shí).活套先下降到某一高度,再經(jīng)過(guò)一定時(shí)間后,才完全下落到等待位置。
圖2是活套動(dòng)作的一次完整升降過(guò)程示意圖。圖中1段為活套起始位,也叫等待位;圖中2段為活套上游機(jī)架咬鋼后略微抬起所到達(dá)的預(yù)備升起位。活套1位與2位的角度相差很小,甚至可以相同,都屬于正常情況;圖中3段為活套下游機(jī)架咬鋼后上升到的工作位,保持正常軋制的過(guò)程;圖中4段為活套上游機(jī)架拋鋼前某時(shí)刻,活套要到達(dá)的小套控制角度,3段與5段之間的過(guò)渡期就是小套控制過(guò)程;圖中5段為小套過(guò)程后,上游機(jī)架拋鋼前,活套要回到的起始位置,與1段時(shí)的角度相同。
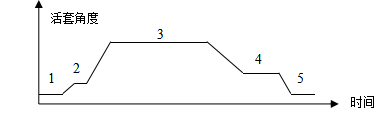
圖2 活套完整升降過(guò)程示意圖
Fig.2 The views of looper movement
3 小套過(guò)程對(duì)甩尾的影響及其優(yōu)化策略
小套過(guò)程,參見(jiàn)圖2是指3段結(jié)束與5段開(kāi)始之間的活套動(dòng)作過(guò)程,一般4段時(shí)的活套角度約為正常軋制角度的一半,由帶尾跟蹤系統(tǒng)啟動(dòng)小套控制過(guò)程。控制原理、方法與整個(gè)活套控制過(guò)程一致,我廠采用套量、張力雙閉環(huán)控制系統(tǒng),預(yù)設(shè)一定的下降角度。在保證活套功能的前提下,有利于活套下落過(guò)程的平穩(wěn),減少機(jī)械沖擊,這種控制策略常見(jiàn)于西門(mén)子、西馬克設(shè)計(jì)的熱連軋產(chǎn)線。
甩尾是帶鋼尾部進(jìn)入本機(jī)架前偏離帶鋼中心線而嚴(yán)重地左擺或右擺刮蹭側(cè)導(dǎo)板,或者在張力沒(méi)有消失的情況下上游機(jī)架拋鋼,造成帶尾對(duì)本機(jī)架的拍打。
甩尾的危害:造成尾部疊軋、碎鋼劃傷輥面,影響后續(xù)產(chǎn)品表面質(zhì)量,甩尾堆鋼或產(chǎn)生的碎片極易潛藏在機(jī)架中,難于清理,很可能造成更嚴(yán)重的質(zhì)量或設(shè)備事故,碎鋼或破爛的帶尾還會(huì)嚴(yán)重影響到卷取設(shè)備。
造成甩尾的因素較多:板坯偏移軋制中心線較多,板坯楔形、鐮刀彎或S彎較嚴(yán)重,調(diào)平操作異常,兩側(cè)AGC壓下不同步,軋制力分配、軋制計(jì)劃不合理,輥型磨削、配型不合理,板坯溫度不勻,活套工作異常,板坯尾部缺陷、導(dǎo)板對(duì)中不良等等。上述的每個(gè)問(wèn)題,都值得作為一個(gè)專項(xiàng)課題,認(rèn)真加以核查、研究、改善,以便盡量減少甩尾現(xiàn)象發(fā)生。
當(dāng)然,以上的諸多問(wèn)題,或許有些指標(biāo)并不錯(cuò),不足以造成甩尾,或許還有些問(wèn)題較嚴(yán)重,且互相交叉、互相影響。針對(duì)實(shí)際情況,也肯定存在著一個(gè)或幾個(gè)關(guān)鍵因素,對(duì)甩尾有著直接的影響,克服了這些關(guān)鍵因素,也就達(dá)到了較滿意的效果。
經(jīng)過(guò)認(rèn)真分析和現(xiàn)場(chǎng)實(shí)際情況,我們優(yōu)化了活套的小套控制過(guò)程,大大減少了甩尾的發(fā)生。圖3為實(shí)際軋制過(guò)程中小套階段的角度曲線,對(duì)比圖2中第3段之后部分,較平坦部分即是3、4、5段。
我們知道:在軋制過(guò)程中,由于帶鋼具有一定的張力,尤其是卷鋼之后全程建立起的張力,在很大程度上限制了帶鋼的跑偏,即便有調(diào)平操作,對(duì)跑偏的影響也很有限;即便帶鋼偏離中心線,也會(huì)保持相對(duì)的穩(wěn)定。偶有甩尾的情況,更是如此,否則設(shè)備狀態(tài)就很糟糕了,為設(shè)備管理所不允許。在穿帶過(guò)程中,導(dǎo)板可以限制跑偏;在出尾階段,適當(dāng)?shù)膶?dǎo)板寬度附加值,也可以有效防止甩尾。所以,活套張力控制,尤其是小套控制階段,馬上就要出尾了,更是防止甩尾的關(guān)鍵期,要在防止尾部“甩動(dòng)”上尋求解決方法。
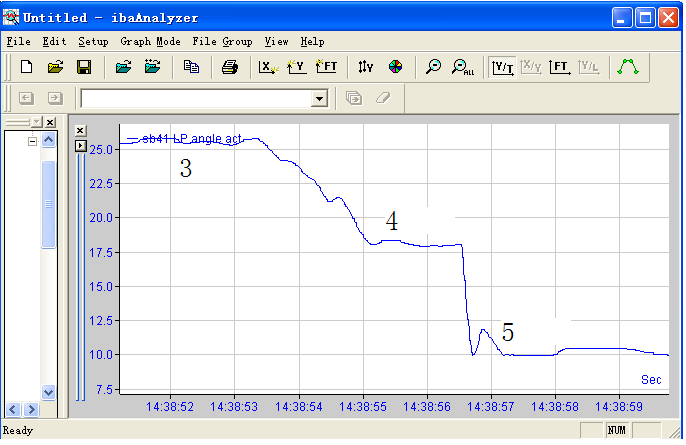
圖3小套過(guò)程角度截圖
Fig.3 The views of looper angle retract movement
在小套控制生效后,尾部雖呈自由狀態(tài),如果隨著活套角度的逐漸降低,依然使帶鋼保持原有的張力,甚至張力略有增加,那么機(jī)架前的帶尾就不會(huì)亂動(dòng),否則,軋制力或輥縫的不均衡必然導(dǎo)致尾部甩動(dòng)。即,本機(jī)架拋鋼前,活套雖然降低了一定的角度,但要盡量不失張,等到本機(jī)架拋鋼前一定的時(shí)間點(diǎn),活套再迅速由小套位降到等待位。顯然,圖3中,第4段的時(shí)間越短越好,它使張力消失的時(shí)刻,即第4段的結(jié)束點(diǎn),機(jī)架前剩余的帶尾長(zhǎng)度盡量短,就更不容易“甩”。
因?yàn)閹т搹埩κ怯捎?jì)算間接得到的,由于一些擾動(dòng)、計(jì)算、控制周期等因素不可能包括在計(jì)算公式之內(nèi),致使張力計(jì)算、控制不能很準(zhǔn)確及時(shí),再者,第4階段的時(shí)間,也和軋制規(guī)格、品種,尤其是軋制速度速度有關(guān),經(jīng)過(guò)我們反復(fù)驗(yàn)證,第4階段時(shí)間的最大值最好小于0.3秒。即通過(guò)調(diào)整小套控制開(kāi)始時(shí)間點(diǎn),使3、4段的過(guò)渡段曲線向后平移,壓縮第4段的時(shí)間,使之小于0.3秒。在系統(tǒng)跟蹤程序中,有各個(gè)機(jī)架的這個(gè)時(shí)間參數(shù)值,邊調(diào)整邊觀測(cè)第4段的時(shí)間變化即可。
小套控制中另一個(gè)值得優(yōu)化的參數(shù)是落套加速度,即加速第3段向第4段的過(guò)渡。注意這個(gè)加速過(guò)程與第4段時(shí)間長(zhǎng)度有關(guān)聯(lián),需要反復(fù)觀察調(diào)整。控制程序中也有落套速度控制參數(shù),可以直接修改。優(yōu)化的最終要求是:本機(jī)架拋鋼前保持張力,剩余的帶尾長(zhǎng)度盡量短,落套過(guò)程連貫迅速。
4 小套控制優(yōu)化效果
圖4為優(yōu)化前的小套過(guò)程,藍(lán)色線為活套角度,紅色線為張力,綠色線為軋制力,期間小套平臺(tái)時(shí)間較長(zhǎng),達(dá)到2秒多,容易甩尾。圖5為優(yōu)化后的小套過(guò)程,效果較為理想,一架機(jī)架的平臺(tái)時(shí)間近似為0,另一機(jī)架的平臺(tái)時(shí)間約0.25秒,落套過(guò)程也很迅速,有效地避免了甩尾。
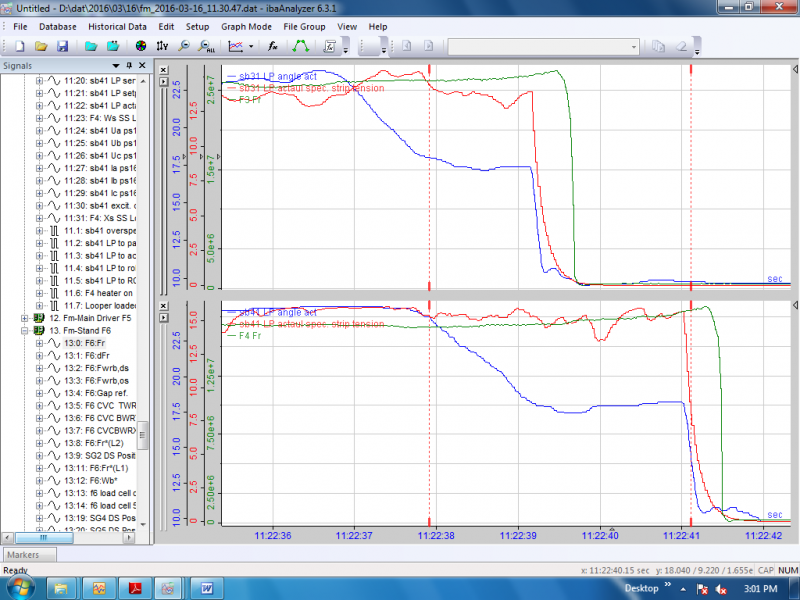
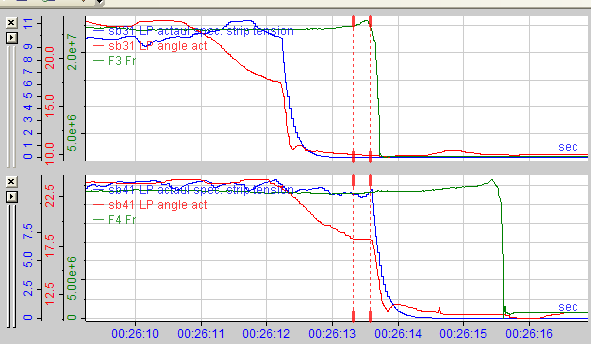
圖4優(yōu)化前的小套過(guò)程 圖5優(yōu)化后的小套過(guò)程
Fig.4 The views of looper retract movement Fig.5 The views of looper retract movement
before optimization after optimizing
圖6與圖7分別是F5機(jī)架活套優(yōu)化前后的動(dòng)態(tài)響應(yīng)曲線,由圖可見(jiàn),振動(dòng)明顯減小,取得了很好的控制效果。
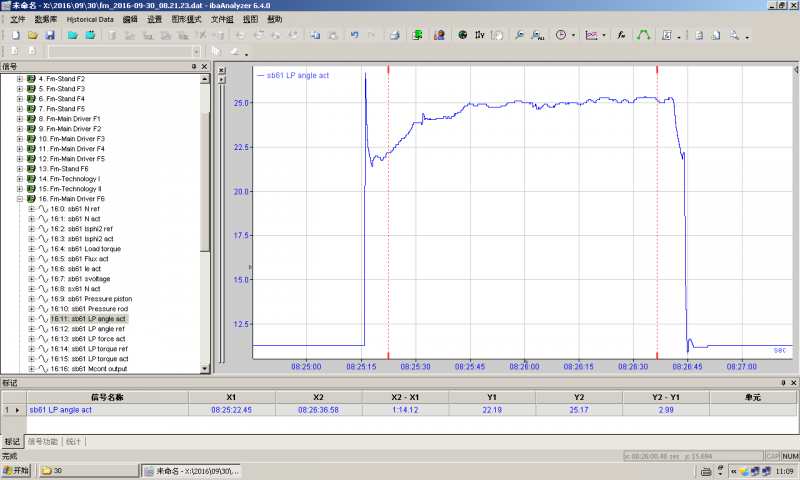
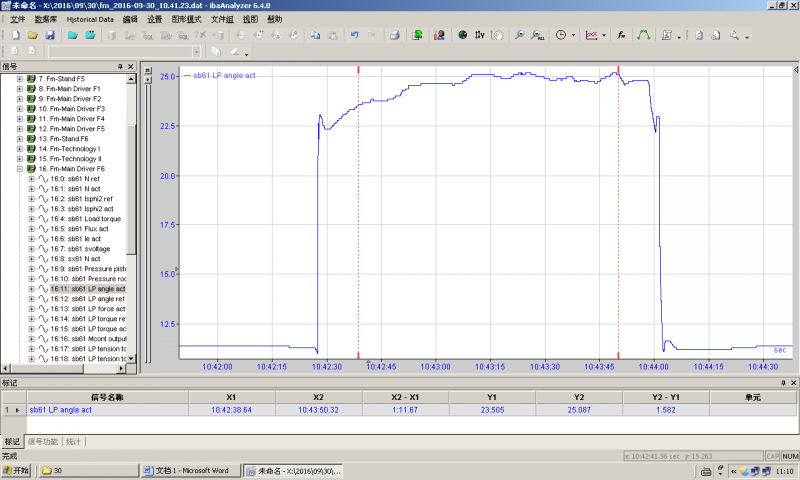
圖6 F5優(yōu)化前的小套過(guò)程 圖7 F5優(yōu)化后的小套過(guò)程
Fig.6 The views of looper retract movement Fig.7 The views of looper retract movement
Before F5 optimization after F5 optimizing
5 結(jié)束語(yǔ)
通過(guò)對(duì)我廠熱軋機(jī)組小套過(guò)程控制的優(yōu)化,大幅度降低了甩尾現(xiàn)象發(fā)生,效果顯著,減少了設(shè)備事故。建議定期觀察小套過(guò)程的波形,適時(shí)調(diào)整相關(guān)控制參數(shù),彌補(bǔ)消除設(shè)備缺陷,滿足長(zhǎng)期穩(wěn)定生產(chǎn)的要求。
參考文獻(xiàn)
[1] 劉玠,楊衛(wèi)東,劉文仲. 熱軋生產(chǎn)自動(dòng)化技術(shù)[M] 冶金工業(yè)出版社,2006.
[2] 電氣設(shè)備功能手冊(cè).內(nèi)部資料.
[3] 王萌 2300熱連軋活套控制系統(tǒng)研究 東北大學(xué) 2009
[4] 傅劍,楊衛(wèi)東,孫一康等 武鋼1700mm熱連軋活套控制系統(tǒng)改造實(shí)踐 冶金自動(dòng)化 2005
[5] 侯建華,王京,宗勝悅 熱連軋液壓活套控制系統(tǒng)的建模研究 電氣傳動(dòng) 2009
[6] 唐光浩 熱連軋活套控制系統(tǒng) 東北大學(xué)碩士論文20030801