
程曉婷,谷端躍,鄭玉平
(首鋼京唐鋼鐵聯(lián)合有限責(zé)任公司,河北唐山063200)
摘要:重點(diǎn)介紹了高爐上料系統(tǒng)中液壓馬達(dá)驅(qū)動(dòng)主皮帶機(jī)在實(shí)際應(yīng)用過(guò)程中存在的一些問(wèn)題,針對(duì)這些問(wèn)題提出改進(jìn)措施并加以實(shí)施,達(dá)到了良好的使用效果。
關(guān)鍵詞:高爐;上料系統(tǒng);液壓馬達(dá);皮帶
上料主皮帶是上料系統(tǒng)的關(guān)鍵設(shè)備,某工廠(chǎng)高爐上料主皮帶采用液壓馬達(dá)驅(qū)動(dòng)技術(shù),相較于高壓電機(jī)加減速機(jī)的驅(qū)動(dòng)方式,液壓馬達(dá)驅(qū)動(dòng)具有帶速可調(diào)、趕料速度快等優(yōu)點(diǎn),但是在應(yīng)用的過(guò)程中也遇到一些問(wèn)題,本文主要針對(duì)液壓馬達(dá)在高爐主皮帶上應(yīng)用和改進(jìn)進(jìn)行闡述。
1上料主皮帶液壓馬達(dá)驅(qū)動(dòng)簡(jiǎn)介
高爐上料主皮帶由N1、N2、N3組成,均采用液壓馬達(dá)驅(qū)動(dòng)。其中N2皮帶運(yùn)輸?shù)V料,N3皮帶運(yùn)輸焦炭,N2、N3將礦料和焦炭運(yùn)輸放至N1,然后由N1將爐料拉至爐頂料罐。上料主皮帶機(jī)液壓馬達(dá)系統(tǒng)包含3個(gè)子系統(tǒng):N1皮帶驅(qū)動(dòng)系統(tǒng)、N2皮帶驅(qū)動(dòng)系統(tǒng)和N3皮帶驅(qū)動(dòng)系統(tǒng),子系統(tǒng)間通過(guò)DP總線(xiàn)串聯(lián)至上料PLC控制系統(tǒng)通訊。
液壓驅(qū)動(dòng)具有動(dòng)力傳遞方向靈活、設(shè)備體積小、扭力大等特點(diǎn)[1]。高爐驅(qū)動(dòng)主皮帶用液壓馬達(dá)由瑞典赫格隆公司生產(chǎn),其設(shè)計(jì)特點(diǎn)鮮明,可作為低轉(zhuǎn)速、大扭矩的機(jī)械動(dòng)力。與傳統(tǒng)的高壓電機(jī)加減速機(jī)相比,它具有很多優(yōu)點(diǎn)。具體比較見(jiàn)下表1。

2液壓馬達(dá)驅(qū)動(dòng)上料主皮帶存在的問(wèn)題與改進(jìn)
液壓馬達(dá)驅(qū)動(dòng)雖然有很多優(yōu)點(diǎn),但是在實(shí)際應(yīng)用的過(guò)程中尤其是在和整個(gè)上料系統(tǒng)對(duì)接過(guò)程中仍然遇到一些問(wèn)題。按照設(shè)計(jì)要求和實(shí)際應(yīng)用條件,對(duì)液壓馬達(dá)驅(qū)動(dòng)技術(shù)存在的主要問(wèn)題進(jìn)行了改進(jìn),達(dá)到了應(yīng)有的效果。
2.1主皮帶速度的改進(jìn)
高爐上料系統(tǒng)要求三條主皮帶速度必須完全一致并精準(zhǔn)可調(diào)。但是在實(shí)際應(yīng)用過(guò)程中,帶速的精準(zhǔn)性不高.這一問(wèn)題必須予以解決。
2.1.1程序開(kāi)、閉環(huán)控制
原設(shè)計(jì)為閉環(huán)控制,閉環(huán)控制PID調(diào)節(jié)功能可有效補(bǔ)償因負(fù)載變化引起的速度改變,從而保證馬達(dá)轉(zhuǎn)速穩(wěn)定。但是在生產(chǎn)過(guò)程中發(fā)現(xiàn)皮帶長(zhǎng)時(shí)間運(yùn)行后,PID調(diào)節(jié)功能減弱,出現(xiàn)各個(gè)站電機(jī)主泵閥開(kāi)度不一致,即各個(gè)站驅(qū)動(dòng)力、輸出功率不同,甚至出現(xiàn)個(gè)別站滿(mǎn)負(fù)荷運(yùn)行、個(gè)別站不出力的情況。經(jīng)過(guò)長(zhǎng)時(shí)間的試驗(yàn),對(duì)多個(gè)數(shù)據(jù)記錄匯總分析總結(jié)后,將N1皮帶其中4個(gè)站改為開(kāi)環(huán)控制,并設(shè)置好合適的開(kāi)度,將另一個(gè)站改為閉環(huán)控制,使各個(gè)站主泵開(kāi)度接近,最終達(dá)到五個(gè)站驅(qū)動(dòng)功率基本相同。同樣,N2、N3皮帶也采取閉環(huán)和開(kāi)環(huán)相結(jié)合的方式,使各個(gè)站驅(qū)動(dòng)功率相等,運(yùn)行更加平穩(wěn)。
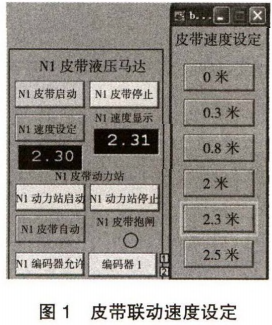
2.1.2皮帶聯(lián)動(dòng)帶速設(shè)定
生產(chǎn)過(guò)程中調(diào)整帶速采用手動(dòng)輸入三條皮帶速度值的方式,存在輸錯(cuò)風(fēng)險(xiǎn)。另外,三條皮帶的帶速應(yīng)完全一致。因此,將速度數(shù)值輸入改為檔位選擇, 設(shè)定了 5 擋,分別是 0 m/s、0.8 m/s、2 m/s、2.3 m/s、2.5 m/s,只需要設(shè)定N1帶速,N2、N3速度自動(dòng)聯(lián)動(dòng)。
這樣,在趕料時(shí)用2.5 m/s帶速,在檢修設(shè)備時(shí)可以用0.8 m/s帶速。實(shí)際速度與設(shè)定速度之差大于0.1 ml s時(shí)自動(dòng)停機(jī)。在啟動(dòng)時(shí)為避免料頭、料尾時(shí)間計(jì)算的誤差,在啟動(dòng)后速度達(dá)到0.8 m/s以上開(kāi)始按正常帶速計(jì)算料頭、料尾時(shí)間。
2.1.3料頭、料尾時(shí)間計(jì)算
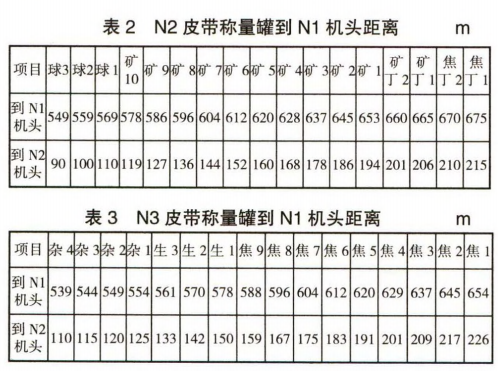
由于上料倉(cāng)下料罐較多,各罐到N1機(jī)頭長(zhǎng)度不同,最遠(yuǎn)料罐到N1機(jī)頭距離達(dá)到675 m,如果按照以前固定料頭、料尾時(shí)間的方法,會(huì)造成大段皮帶已經(jīng)沒(méi)料而料尾時(shí)間未走完的情況,嚴(yán)重影響拉料速度。因此,改進(jìn)上料程序,采用各罐分別計(jì)算料頭、料尾時(shí)間,同時(shí)對(duì)應(yīng)不同的帶速分別固定料頭、料尾時(shí)間,使料頭、料尾時(shí)間不會(huì)因?yàn)閹俚母淖兌l(fā)生錯(cuò)誤。料頭、料尾時(shí)間的精確計(jì)算大大提高了拉料速度,為大礦批拉料打下了堅(jiān)實(shí)的基礎(chǔ)。
2.2 DP網(wǎng)網(wǎng)絡(luò)問(wèn)題的改進(jìn)
原設(shè)計(jì)中三條主皮帶共設(shè)9個(gè)動(dòng)力站,各動(dòng)力站使用一條DP網(wǎng)網(wǎng)線(xiàn)連接,三條主皮帶動(dòng)力站的距離較遠(yuǎn),存在一定的隱患,如果發(fā)生斷網(wǎng)或網(wǎng)絡(luò)故障,處理時(shí)間會(huì)很長(zhǎng),若不能及時(shí)處理,可能會(huì)造成高爐減風(fēng)甚至停風(fēng)。針對(duì)此問(wèn)題,額外增加一路DP網(wǎng)作為備用,一旦工作中的DP網(wǎng)發(fā)生問(wèn)題,立刻倒用備用網(wǎng)絡(luò),這樣能夠增加網(wǎng)絡(luò)的安全性,有效消除網(wǎng)絡(luò)故障對(duì)高爐上料系統(tǒng)的影響。
2.3液壓馬達(dá)Spider控制器電壓的改進(jìn)
Spider控制器是液壓馬達(dá)的中心控制器,也是皮帶機(jī)控制系統(tǒng)的核心,它不但控制液壓馬達(dá),接受和監(jiān)控各個(gè)測(cè)點(diǎn),作出判斷和處理,控制和保護(hù)外部設(shè)備的運(yùn)行,還能與上料系統(tǒng)PLC、電氣系統(tǒng)進(jìn)行通訊完成液壓系統(tǒng)控制[2]。Spider控制器具有多種功能,如馬達(dá)轉(zhuǎn)速、扭矩的控制,兩液壓馬達(dá)的同步控制,馬達(dá)溫度及轉(zhuǎn)速監(jiān)測(cè)和動(dòng)力站的主要參數(shù)的記錄等,同時(shí)可實(shí)現(xiàn)面板按鈕的快速調(diào)節(jié)及遠(yuǎn)程邏輯控制[3]。
在皮帶運(yùn)行過(guò)程中偶爾發(fā)生液壓馬達(dá)Spider控制器不明原因停止工作的現(xiàn)象,嚴(yán)重影響了高爐的正常生產(chǎn)。液壓馬達(dá)Spider控制器采用的供電電源在設(shè)計(jì)中是從主控樓的UPS引到聯(lián)合料倉(cāng)過(guò)程站,通過(guò)過(guò)程站引到現(xiàn)場(chǎng)動(dòng)力站附近的自動(dòng)化控制柜,再到Spider控制器。因此造成供電電壓降低,時(shí)常造成Spider控制器停止工作。為此,通過(guò)線(xiàn)路改造,將聯(lián)合料倉(cāng)過(guò)程站的供電電源改由N1高壓配電室供電,并且在倉(cāng)下過(guò)程站增加UPS,有效地避免了由于電壓?jiǎn)栴}導(dǎo)致的Spider控制器停止工作的現(xiàn)象。
2.4增加備用速度編碼器
測(cè)速單元能否正常工作是液壓馬達(dá)能否工作的一個(gè)關(guān)鍵環(huán)節(jié),原設(shè)計(jì)中每條主皮帶只有一個(gè)速度編碼器,速度編碼器一旦出現(xiàn)問(wèn)題,故障處理至少需要40 min,嚴(yán)重影響高爐的正常生產(chǎn)。
為此,必須增加備用速度編碼器。速度編碼器實(shí) 物如下圖2所示。
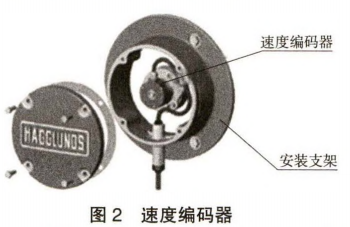
在程序及主控畫(huà)面上增加編碼器的切換允許按鈕和切換按鈕,為防止誤操作導(dǎo)致編碼器的非計(jì)劃切換,每次切換編碼器時(shí)需先點(diǎn)切換允許按鈕再點(diǎn)切換按鈕才能完成編碼器之間的切換。每個(gè)編碼器有6根線(xiàn)與Spider控制器相連接,兩個(gè)編碼器的切換需用兩個(gè)繼電器完成,第一個(gè)繼電器完成4根信號(hào)線(xiàn)的切換,第二個(gè)繼電器完成2根電源線(xiàn)的切換。
為保護(hù)編碼器,切換的要求是:每次切換時(shí)第一個(gè)繼電器先動(dòng)作,0.5 s后第二個(gè)繼電器再動(dòng)作,保證電源切換時(shí)信號(hào)線(xiàn)已經(jīng)完成良好接觸。為了保護(hù)編碼器,兩次編碼器的切換間隔應(yīng)大于5 s。
以從編碼器EN1到編碼器EN2的切換為例,如上圖3所示,在操作畫(huà)面上點(diǎn)允許切換按鈕,然后再點(diǎn)切換按鈕,繼電器程序立刻給繼電器1輸出,繼電器1得電動(dòng)作,0.5sRTO計(jì)時(shí)完成,繼電器2得電動(dòng)作。兩個(gè)繼電器都得電動(dòng)作后,完成從編碼器EN1到編碼器EN2的切換。經(jīng)過(guò)以上改進(jìn)后,使用效果良好,避免了主皮帶因?yàn)榫幋a器問(wèn)題不能啟動(dòng)的事故。

2.5操作畫(huà)面的設(shè)計(jì)與改進(jìn)
下圖4是皮帶液壓馬達(dá)操作主控制畫(huà)面,在此畫(huà)面上可實(shí)現(xiàn)對(duì)皮帶以及液壓馬達(dá)的各種遠(yuǎn)程操作。

3結(jié)語(yǔ)
液壓馬達(dá)驅(qū)動(dòng)技術(shù)在高爐上料主皮帶上的應(yīng)用取得了良好效果,通過(guò)在應(yīng)用過(guò)程中的不斷改進(jìn)和完善,達(dá)到了設(shè)計(jì)要求,實(shí)現(xiàn)了啟動(dòng)過(guò)程平穩(wěn)、帶速精準(zhǔn)可調(diào)和靈活啟停的目標(biāo),同時(shí),通過(guò)程序的自動(dòng)運(yùn)算,使每批料在皮帶上的位置都極為精準(zhǔn),為提升高爐上料能力和穩(wěn)定性打下了堅(jiān)實(shí)的基礎(chǔ),為高爐長(zhǎng)期順?lè)€(wěn)創(chuàng)造了條件,也為新廠(chǎng)建設(shè)提供了一種新的思路,具有良好的示范和推廣作用。
參考文獻(xiàn)
[1] 劉國(guó)忠,劉靖軒.利用液壓馬達(dá)駛動(dòng)的鉆冰機(jī)試驗(yàn)及效果評(píng)價(jià)[J].東北水利水電,2018(10):44.
[2] 趙相軒,劉尊義,王煒,等Spider控制器在燒結(jié)輸送中的研究與應(yīng)用[J].冶金叢刊,2011(2):22.
[3] 張少偉,余斌.液壓馬達(dá)在首鋼京唐5 500 m3高爐上料主皮帶的應(yīng)用[J].自動(dòng)化技術(shù)與應(yīng)用,2007( 12):10&